Ajou News
NEW 기계 고제성 교수팀, 소금쟁이과 곤충 움직임 메커니즘 밝혀 '초소형 로봇' 제작
- 2025-08-22
- 247
- <사이언스(Science)> 8월호 표지논문 게재
- 김동진 박사 제1저자, 김창환 박사과정생 공동저자로 참여

아주대 연구팀이 물 위에서 자유자재로 움직이는 곤충 부채다리 소금쟁이를 모사한 초소형 로봇을 세계 최초로 개발했다. 곤충의 기동 메커니즘 연구를 기반으로 한 생체 모사 로봇으로, 해당 내용은 글로벌 학술지 <사이언스(Sceince)>의 8월호 표지논문으로 실렸다.
고제성 교수(기계공학과) 연구팀은 물 위에서 초고속 기동을 펼치는 소금쟁이과 곤충 라고벨리아(Rhagovelia)의 기동 원리를 밝혀내고 이를 모방한 초소형 반수생 로봇을 개발했다고 밝혔다.
해당 내용은 ‘초고속 탄성-모세관 팬을 통한 반수생 곤충과 로봇의 민첩한 기동 제어(Ultrafast elastocapillary fans control agile maneuvering in ripple bugs and robots)’라는 제목으로 글로벌 학술지 <사이언스(Science)> 8월호에 표지논문으로 게재됐다.
아주대 기계공학과 김동진 박사후연구원(위 사진 제일 왼쪽)이 제1저자로, 김창환 박사과정생(위 사진 가운데)이 공공저자로 참여했고 고제성 교수(위 사진 제일 오름쪽)가 교신저자로 함께 했다. 미국 조지아공과대학(Georgia Institute of Technology) 사드 밤라(Saad Bhamla) 교수와 캘리포니아대학버클리(UC Berkeley) 빅터 M. 오르테가-히메네스(Victor M. Ortega-Jimenez) 교수도 함께 참여했다. 아주대 연구팀은 생물을 모사한 로봇의 개발을, 조지아공대·캘리포니아대버클리 연구팀은 생물의 기동 메커니즘 연구를 맡았다.
소금쟁이과 곤충 라고벨리아(Rhagovelia)는 다리의 부채꼴 구조를 이용해 흐르는 물살에도 빠르게 나아가고 급회전을 구사하는 등 민첩하게 움직일 수 있다(0.05초 만에 최대 96도 급선회). 하지만 이러한 기동 메커니즘에 대해서는 그동안 명확하게 밝혀진 바가 없었다. 기존 연구에서는 라고벨리아 다리 끝에 부착된 부채 형태의 납작한 끈 구조가 라고벨리아의 근육에 의해 작동하는 것으로 파악해 왔으나, 아주대 공동 연구팀은 근육 에너지에 대한 의존 없이 수중 환경과의 상호작용으로 인한 움직임이라는 점을 규명해냈다.
이번 연구에 따르면 라고벨리아의 초고속 기동은 ‘탄성-모세관 현상’에 의한 것으로, 이 현상은 얇고 유연한 구조가 물의 표면장력과 탄성으로 인해 빠르게 변형되는 물리적 메커니즘이다. 라고벨리아 다리 끝의 부채꼴 구조가 물속에 들어가면 0.01초 이내에 스스로 펼쳐지고, 물 밖에서는 곧바로 접히는 것이 바로 물의 표면장력과 부채꼴 구조라는 유연한 물질 사이의 섬세한 상호작용이라는 것. ‘탄성-모세관 현상’은 거시적 구조의 분석에서는 간과되거나 무시되지만, 작은 크기 곤충의 움직임 같은 규모의 분석에서는 중요한 역할을 한다.
공동 연구팀은 새롭게 발견한 기동 메커니즘을 모방해 무게 1mg의 초경량 인공 팬(fan)을 개발하고, 이를 장착한 0.23g의 초소형 로봇 ‘라고봇(Rhagobot)’을 구현해냈다. 이 초소형 로봇은 형상기억합금 기반 17mg의 인공 근육 구동기도 장착하고 있어, 기존의 반수생 로봇들보다 더욱 민첩하게 제동하고 방향을 바꿀 수 있다(1초 만에 206도 회전 가능).
기존의 초소형 로봇 연구는 곤충의 다리 구조나 근육 기반 메커니즘에 의존, 표면장력을 무시하거나 최소화할 수 있는 방향으로만 설계되어 실제 곤충 수준의 속도 조절과 제동·회전 등 복잡한 기동 구현에 한계를 보였다. 그러나 아주대 공동 연구팀은 자연계 자기형상변화(self-morphing) 구조의 원리 규명을 통해 로봇의 추진력을 효율적으로 발생시킬 수 있었다.
이번 연구를 주도한 아주대 고제성 교수는 “자연계 곤충이 가진 구조적 지능(embodied intelligence)을 활용해 물리적 구조·재료적 특성이 환경과 상호작용하면서 자연스럽게 발현될 수 있도록 구현해냈다는 점에서 의미 있는 연구”라고 말했다.
고제성 교수는 이어 “앞으로 급류 환경에서의 환경 모니터링과 재난 탐사 및 구조 활동뿐 아니라 물의 계면이 존재하는 뇌 등 생체 내 환경에도 적용될 수 있을 것으로 기대한다”라고 덧붙였다.
우리 학교 기계공학과 고제성 교수는 앞서 박사과정부터 15년여간 소금쟁이를 비롯한 곤충 등 자연을 모사한 소형 로봇 연구에 매진해왔다. 지난 2017년 우리 학교에 임용된 고제성 교수의 지도로, 아주대 기계공학과에서 학사-석사-박사를 마치고 현재 박사 후 연구원으로 재직 중인 김동진 박사가 이번 연구에 주도적으로 참여해, 제1저자로 이름을 올렸다. 공동저자로 기여한 김창환 박사과정생 역시 아주대 기계공학과에서 학업을 시작하고 이어왔다.
김동진 박사는 “이번 연구에 참여해 실제 로봇의 기능을 완성하는데 4년에 가까운 시간이 필요했고, 1만 번 이상의 실패가 이어졌다”며 “앞으로도 세상에 없던 새로운 것을 만들고, 사람들과 사회에 도움이 되는 연구를 하고 싶다”라고 전했다.
이번 연구는 한국연구재단의 우수신진연구, 기초연구실사업과 아주대학교 교내 연구비 지원을 받아 수행됐다.
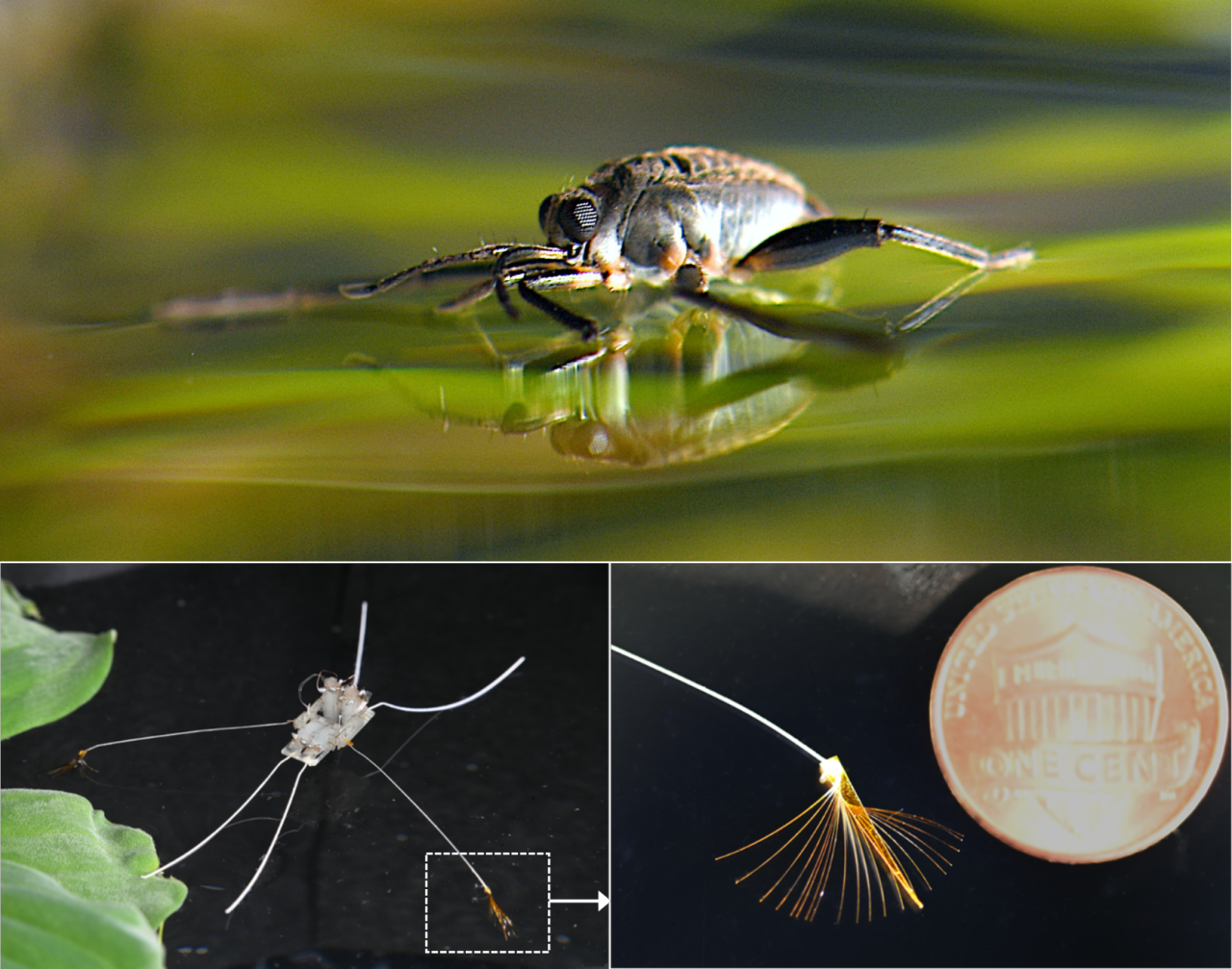
(위) 라고벨리아 곤충의 모습. (아래 왼쪽) 아주대 연구팀이 개발한 소형 로봇과
(아래 오른쪽) 약 1mg의 무게, 21개 끈 형태의 털로 구성된 자가변형 인공 팬(fan)
 8월22일 공개된 <사이언스(Science)> 표지. 아주대 국제 공동 연구팀의 연구 내용이 담겨 있다_제공 사이언스(Science)
8월22일 공개된 <사이언스(Science)> 표지. 아주대 국제 공동 연구팀의 연구 내용이 담겨 있다_제공 사이언스(Science)
다음글